ref-GC-011.html
updated: April, 7th, 2013
Verso la fine degli anni '70 un tecnico italiano, Giorgio Comerio, inizio' a realizzare sistemi di ripresa televisivi subacquei utilizzando le prime telecamere - in bianco e nero - a luce intensificata.
Le telecamere a luce intensificata permettevano la ripresa televisiva con scarsitŕ di luce ed in acque torbide.
Giorgio Comerio, con un team di tecnici elettronici di Busto Arsizio, svuluppo' i progetti dei diversi veicoli subacquei e successivamete realizzo' delle telecamere filogidate in grado di operare, inizialmente, fino a 100 metri di profonditŕ.
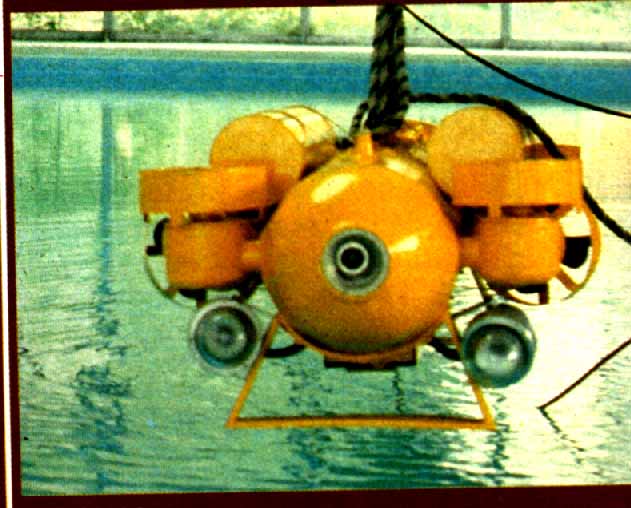
I primi veicoli furono costruiti in vetroresina e propulsi da sei motori passo-passo in grado di garantire
la navigazione orizzontale ed anche la traslazione verticale.
Il sistema era alimentato attraverso un sottile cavo coassiale galleggiante.
Il veicolo, privo di batterie - se non di un piccolo accumulatore per operazioni di emergenza - poteva operare senza
nessun limite di tempo.
Sullo stesso cavo coassiale venivano inviati, dalla superficie al veicolo, i comandi dei sei motori passo-passo,
i comandi per la timoneria
( verticale ed orizzontale ) ed i comandi per le emergenze.
Il sistema prevedeva anche una serie di giroscopi atti ad attuare la funzione di "stop" automatico del veicolo in
una data posizione di ripresa.
Le emergenze previste erano sia lo sgancio della zavorra per un'emersione rapida, sia lo sgancio
del cavo di connessione dallo scafo
per liberarsi da eventuali impigli.
Dal veicolo alla superficie veniva trasmessa l'immagine televisiva con, in sovraimpressione,
i dati relativi alla navigazione, parametri di profonditŕ ed assetto, giorno ed ora.
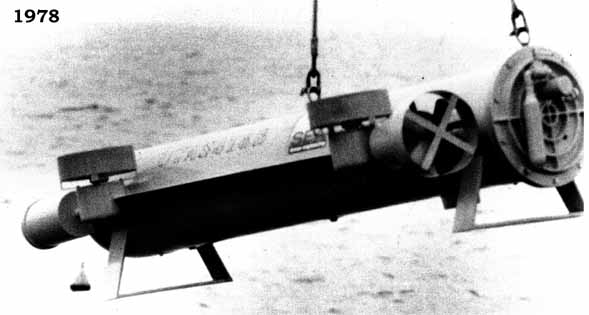
Negli anni successivi furono realizzati anche i prototipi di due veicoli atti ad operare fino a -400 mt di profonditŕ
e dotati di bracci per
la manipolazione e per la disattivazione delle mine subacquee.
Questi ultimi veicoli vennero realizzati in leghe speciali di alluminio atte a garantire una segnatura magnetica
assolutamente ridotta.
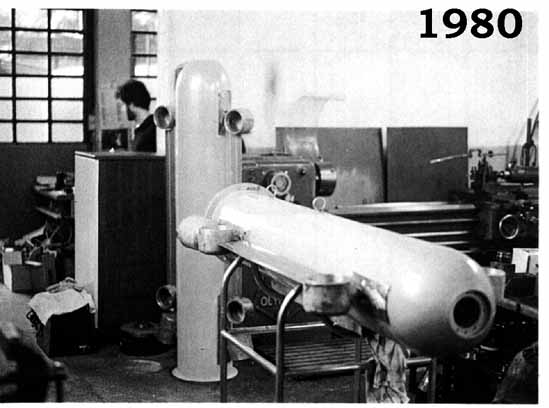
Il sistema di trasmissione della propulsione era giŕ attuato mediante speciali giunti
More details:
The ROV - Specification.